OCTOPUZ
讓機械手臂持續運作並且為你所用!


全球焊接技術龍頭 ESAB 旗下的數位雲端軟體,專注於機械手臂離線編程軟體的開發,廣泛應用於各大產業。
OCTOPUZ的開發團隊成立已有近20年的歷史,為解決機械手臂編輯路徑麻煩且調機極為耗時的問題,而萌生了「讓複雜的機械手臂編程變得簡單」的理念。而機械手臂離線編程技術(OLRP, Offline Robot Programming)正是實現這一理念的關鍵技術。
01
3D圖形辨識
自動生成機械手臂焊接或切割路徑
OCTOPUZ 可透過圖形特徵自動識別並生成需要切割或焊接的位置,同時提供選項讓操作人員選擇最適合的加工策略。針對多個孔位或焊接點,系統可在數秒內快速生成運動路徑,大幅提升編程效率與生產效能。
03
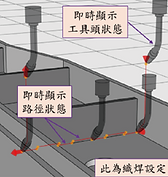
快速模擬加工解決方案
OCTOPUZ 允許使用者直接選擇當前需確認的運動路徑,並透過模擬繼承機制,確保程序在中途啟動時不會遺失物件狀態。
在實際應用中,機械手臂的運動姿態與前一動作密切相關。若使用者直接指定特定路徑進行模擬確認,而模擬系統缺乏繼承機制,可能導致軟體未能判斷軸極限,進而在實際運行時出現軸極限受限或姿態劇烈變換的問題。OCTOPUZ 的繼承機制能有效解決此類問題,確保模擬結果更貼近現��實,提升加工穩定性與可靠性。
05
支援機械手臂外部軸運動
在執行複雜運動時,機械手臂往往需搭配外部旋轉軸或移動地軌,以實現更靈活的加工與運動控制。OCTOPUZ 提供完整的外部軸控制支援,使機械手臂能夠同步操控這些輔助運動裝置。
在實際應用中,切削類機械手臂通常會搭配外部旋轉軸或移動地軌,藉此進行定位或同步運動控制,並可根據需求定義特定的運動角度,以避開碰撞或滿足特殊應用需求。OCTOPUZ 的外部軸支援功能,確保機械手臂在複雜加工環境下仍能維持高效穩定的運行。
02
AI分析運動路徑並提供路徑解決方案
OCTOPUZ 內建專為機械手臂運動路徑設計的 AI,可協助分析並檢測運動路徑中的碰撞、奇異點、關節極限及過行程等問題,並在合理範圍��內自動修正。
在實際應用中,某些關節極限問題可透過機械手臂姿態變化來克服,但姿態變換可能導致物件碰撞的風險。OCTOPUZ 的 AI 能針對此類情境提供最佳解決方案,在確保無碰撞的前提下,有效解決關節極限問題,提升編程精度與執行穩定性。
04
支援外部路徑資料匯入
OCTOPUZ 除了能自行生成加工路徑外,亦支援外部匯入特殊路徑資料,並可處理多種點資料格式,如 3D 列印數據、CAM 資料及 CSV 檔案等。
在實際應用中,一般的點資料僅包含空間位置,並未定義旋轉向量,因此缺乏機械手臂運動所需的關鍵參數。若直接將這些點資料輸入機械手臂並執行任務,將極具風險。
OCTOPUZ 的人工智慧核心能夠智慧解析這些點資料,並為其賦予合理的空間向量定義,使機械手臂的運動更加精確、安全且合乎邏輯。
06
3D介面及佈局,雲端機械手臂資料庫助力快速數位佈局
OCTOPUZ 內建雲端數據庫,支援各大機械手臂品牌的 3D 圖檔,如 FANUC、ABB、KUKA、YASKAWA、UR、OTC、KAWASAKI、NACHI、TM、上銀等。使用者連網後即可直接下載所需機械手臂模型並進行佈局應用。
在 3D 佈局介面中,可直接匯入多種 CAD 格式,讓使用者方便地將待加工零件、夾治具、切削工具、基座、安全圍籬等 3D 圖檔匯入佈局,並用於測量、碰撞預測、空間利用等環境評估。OCTOPUZ 支援多種 3D 圖形格式,包括 CATIA、Inventor、NX、SolidWorks、Pro/E、Creo、Rhino、Solid Edge、Step、Obj、STL、Parasolid 等,確保高度相容性。匯入圖檔後,可在佈局內進行組件關係設定。
OCTOPUZ 突破傳統必須撰寫程式語言的方法,提供圖示化的快速連結功能,使使用者能迅速完成設定。
例如,若手臂前端工具需與機械手臂同步運動,只需在 3D 佈局中右鍵點擊工具的 3D 圖,選擇「連接功能」,再選擇機械手臂的第六軸,即可完成連動設定。此時,在佈局中拖動機械手臂,工具將隨之同步移動。
此外,使用者可在佈局畫面內建立專屬的佈局環境,並製作成專案模板。後續應用時,只需匯入待加工物件,即可快速開始製作加工程式,大幅提升佈局與程式設計的效率。
專注於機械手臂路徑的解決方案







程式編輯功能
導入點位資料

OCTOPUZ 於 2014 年推出經典功能,最初掛載於 SolidCAM 和 MasterCAM,可直接匯入切削路徑至 OCTOPUZ 使用。隨後,此功能進一步發展為通用格式,支援從外部匯入點位資料,使應用更加靈活。
此功能特別適用於機械手臂的切削、拋光研磨、大範圍噴塗及刻字等需要大量點位資料的應用場景,能有效提升作業效率並確保運動軌跡的精準度。